AIGC动态欢迎阅读
原标题:MIT博士让机器人自学“常识”:大模型加持,无需人类即可自我纠正,完成复杂家务
劳动
关键字:机器人,任务,人类,模型,家务
文章来源:人工智能学家
内容字数:3999字内容摘要:
机器人是出色的人类模仿者,但大多离不开人类的帮助,比如一些预设的编程。
尤其是家用机器人,在面对复杂的家务劳动时,如果“大脑”中没有足够多的常识,就很难满足人类家庭的日常需求。
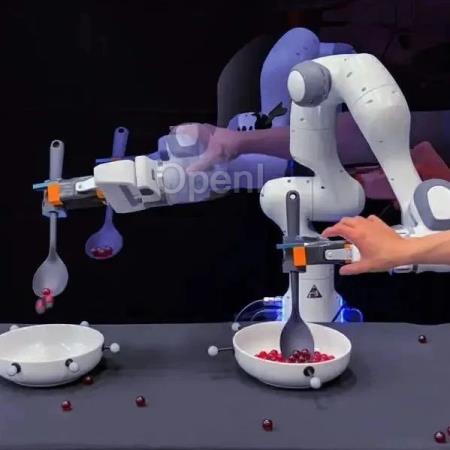
如今,在大型语言模型(LLMs)的驱动下,家用机器人已经可以掌握“常识性知识”,能够在没有人类的帮助下进行自我纠正,出色地完成复杂的家务劳动。
相关研究论文以“Grounding Language Plans in Demonstrations Through Counterfactual Perturbations”为题,以会议论文的形式已发表在人工智能(AI)顶会 ICLR 2024 上。麻省理工学院(MIT)电气工程和计算机科学系博士 Yanwei Wang 为该研究论文的通讯作者。他表示,模仿学习是实现家用机器人的主流方法。但是,如果机器人盲目地模仿人类的运动轨迹,微小的错误就会不断累积,最终导致执行过程中的其他错误。“有了我们的方法,机器人就能自我纠正执行错误,提高整体任务的成功率。”让机器人掌握一点家务常识
从擦拭溢出物到端上食物,机器人正在学习如何完成越来越复杂的家务劳动。
实际上,许多家庭机器人原文链接:MIT博士让机器人自学“常识”:大模型加持,无需人类即可自我纠正,完成复杂家务劳动
联系作者
文章来源:人工智能学家
作者微信:AItists
作者简介:致力成为权威的人工智能科技媒体和前沿科技研究机构